
งานโปรแกรมจดจำท่าทางของมือ MediaPipe ช่วยให้คุณจดจำท่าทางของมือแบบเรียลไทม์ รวมถึงแสดงผลลัพธ์ท่าทางของมือที่จดจำและจุดสังเกตของมือที่ตรวจพบ วิธีการเหล่านี้แสดงวิธีใช้โปรแกรมจดจำท่าทางร่วมกับแอปพลิเคชัน Python
คุณสามารถดูการทํางานของงานนี้ได้โดยการดูการสาธิตบนเว็บ ดูข้อมูลเพิ่มเติมเกี่ยวกับความสามารถ รูปแบบ และตัวเลือกการกําหนดค่าของงานนี้ได้ที่ภาพรวม
ตัวอย่างโค้ด
โค้ดตัวอย่างสำหรับ Gesture Recognizer แสดงการใช้งานที่สมบูรณ์ของงานนี้ใน Python เพื่อเป็นข้อมูลอ้างอิง โค้ดนี้จะช่วยคุณทดสอบงานนี้และเริ่มต้นสร้างโปรแกรมจดจำท่าทางมือของคุณเอง คุณสามารถดู เรียกใช้ และแก้ไขตัวอย่างโค้ดโปรแกรมจดจำท่าทางสัมผัสได้โดยใช้เพียงเว็บเบราว์เซอร์
หากคุณกำลังใช้โปรแกรมจดจำท่าทางสัมผัสสำหรับ Raspberry Pi โปรดดูตัวอย่างแอป Raspberry Pi
ตั้งค่า
ส่วนนี้จะอธิบายขั้นตอนสำคัญในการตั้งค่าสภาพแวดล้อมการพัฒนาและโปรเจ็กต์โค้ดเพื่อใช้ Gesture Recognizer โดยเฉพาะ ดูข้อมูลทั่วไปเกี่ยวกับการตั้งค่าสภาพแวดล้อมการพัฒนาซอฟต์แวร์เพื่อใช้งาน MediaPipe รวมถึงข้อกำหนดเวอร์ชันแพลตฟอร์มได้ที่คู่มือการตั้งค่าสําหรับ Python
แพ็กเกจ
ภารกิจ MediaPipe Gesture Recognizer ต้องใช้แพ็กเกจ mediapipe PyPI คุณติดตั้งและนําเข้าไลบรารีเหล่านี้ได้โดยใช้สิ่งต่อไปนี้
$ python -m pip install mediapipe
การนำเข้า
นําเข้าคลาสต่อไปนี้เพื่อเข้าถึงฟังก์ชันงานของ Gesture Recognizer
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
รุ่น
งานโปรแกรมจดจำท่าทางของ MediaPipe ต้องใช้กลุ่มโมเดลที่ผ่านการฝึกอบรมซึ่งเข้ากันได้กับงานนี้ ดูข้อมูลเพิ่มเติมเกี่ยวกับโมเดลที่ผ่านการฝึกอบรมแล้วสำหรับโปรแกรมจดจำท่าทางได้ที่ภาพรวมของงานส่วนโมเดล
เลือกและดาวน์โหลดโมเดล แล้วจัดเก็บไว้ในไดเรกทอรีในเครื่อง
model_path = '/absolute/path/to/gesture_recognizer.task'
ระบุเส้นทางของโมเดลภายในพารามิเตอร์ชื่อโมเดล ดังที่แสดงด้านล่าง
base_options = BaseOptions(model_asset_path=model_path)
สร้างงาน
งานโปรแกรมจดจำท่าทางของ MediaPipe ใช้ฟังก์ชัน create_from_options เพื่อตั้งค่างาน ฟังก์ชัน create_from_options ยอมรับค่าสำหรับตัวเลือกการกําหนดค่าที่จะจัดการ ดูข้อมูลเพิ่มเติมเกี่ยวกับตัวเลือกการกำหนดค่าได้ที่หัวข้อตัวเลือกการกำหนดค่า
โค้ดต่อไปนี้แสดงวิธีสร้างและกําหนดค่างานนี้
ตัวอย่างเหล่านี้ยังแสดงรูปแบบต่างๆ ของการสร้างงานสำหรับรูปภาพ ไฟล์วิดีโอ และสตรีมวิดีโอสดด้วย
รูปภาพ
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions GestureRecognizer = mp.tasks.vision.GestureRecognizer GestureRecognizerOptions = mp.tasks.vision.GestureRecognizerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a gesture recognizer instance with the image mode: options = GestureRecognizerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.IMAGE) with GestureRecognizer.create_from_options(options) as recognizer: # The detector is initialized. Use it here. # ...
วิดีโอ
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions GestureRecognizer = mp.tasks.vision.GestureRecognizer GestureRecognizerOptions = mp.tasks.vision.GestureRecognizerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a gesture recognizer instance with the video mode: options = GestureRecognizerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.VIDEO) with GestureRecognizer.create_from_options(options) as recognizer: # The detector is initialized. Use it here. # ...
ไลฟ์สด
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions GestureRecognizer = mp.tasks.vision.GestureRecognizer GestureRecognizerOptions = mp.tasks.vision.GestureRecognizerOptions GestureRecognizerResult = mp.tasks.vision.GestureRecognizerResult VisionRunningMode = mp.tasks.vision.RunningMode # Create a gesture recognizer instance with the live stream mode: def print_result(result: GestureRecognizerResult, output_image: mp.Image, timestamp_ms: int): print('gesture recognition result: {}'.format(result)) options = GestureRecognizerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.LIVE_STREAM, result_callback=print_result) with GestureRecognizer.create_from_options(options) as recognizer: # The detector is initialized. Use it here. # ...
ตัวเลือกการกำหนดค่า
งานนี้มีตัวเลือกการกำหนดค่าต่อไปนี้สำหรับแอปพลิเคชัน Python
| ชื่อตัวเลือก | คำอธิบาย | ช่วงของค่า | ค่าเริ่มต้น | |
|---|---|---|---|---|
running_mode |
ตั้งค่าโหมดการทํางานสําหรับงาน โดยโหมดมี 3 แบบ ดังนี้ รูปภาพ: โหมดสำหรับอินพุตรูปภาพเดียว วิดีโอ: โหมดสำหรับเฟรมที่ถอดรหัสของวิดีโอ LIVE_STREAM: โหมดสตรีมแบบสดของข้อมูลอินพุต เช่น จากกล้อง ในโหมดนี้ คุณต้องเรียกใช้ resultListener เพื่อตั้งค่า Listener เพื่อรับผลลัพธ์แบบไม่พร้อมกัน |
{IMAGE, VIDEO, LIVE_STREAM} |
IMAGE |
|
num_hands |
GestureRecognizer ตรวจจับจำนวนมือได้สูงสุด
|
Any integer > 0 |
1 |
|
min_hand_detection_confidence |
คะแนนความน่าเชื่อถือขั้นต่ำที่การตรวจจับมือจะถือว่าประสบความสำเร็จในโมเดลการตรวจจับฝ่ามือ | 0.0 - 1.0 |
0.5 |
|
min_hand_presence_confidence |
คะแนนความเชื่อมั่นขั้นต่ำของคะแนนการมีอยู่ของมือในโมเดลการตรวจหาจุดสังเกตของมือ ในโหมดวิดีโอและโหมดสตรีมแบบสดของตัวจดจำท่าทาง หากคะแนนความเชื่อมั่นของมือที่ปรากฏจากโมเดลจุดสังเกตของมือต่ำกว่าเกณฑ์นี้ ระบบจะเรียกใช้โมเดลการตรวจจับฝ่ามือ หรือจะใช้อัลกอริทึมการติดตามมือแบบเบาเพื่อระบุตำแหน่งของมือเพื่อการตรวจหาจุดสังเกตในภายหลัง | 0.0 - 1.0 |
0.5 |
|
min_tracking_confidence |
คะแนนความเชื่อมั่นขั้นต่ำสำหรับการติดตามมือที่ถือว่าสำเร็จ นี่คือเกณฑ์ IoU ของขอบเขตระหว่างมือในเฟรมปัจจุบันกับเฟรมสุดท้าย ในโหมดวิดีโอและโหมดสตรีมของโปรแกรมจดจำท่าทางสัมผัส หากการติดตามไม่สำเร็จ โปรแกรมจดจำท่าทางสัมผัสจะเรียกให้ระบบตรวจจับมือ มิฉะนั้น ระบบจะข้ามการตรวจจับมือ | 0.0 - 1.0 |
0.5 |
|
canned_gestures_classifier_options |
ตัวเลือกในการกําหนดค่าลักษณะการทํางานของตัวแยกประเภทท่าทางสัมผัสที่บันทึกไว้ ท่าทางสัมผัสสำเร็จรูปคือ ["None", "Closed_Fist", "Open_Palm", "Pointing_Up", "Thumb_Down", "Thumb_Up", "Victory", "ILoveYou"] |
|
|
|
custom_gestures_classifier_options |
ตัวเลือกในการกําหนดค่าลักษณะการทํางานของตัวแยกประเภทท่าทางสัมผัสที่กําหนดเอง |
|
|
|
result_callback |
ตั้งค่าตัวรับผลลัพธ์ให้รับผลการจัดประเภทแบบไม่พร้อมกันเมื่อโปรแกรมจดจำท่าทางอยู่ในโหมดสตรีมแบบสด
ใช้ได้เมื่อตั้งค่าโหมดการทํางานเป็น LIVE_STREAM เท่านั้น |
ResultListener |
ไม่มี | ไม่มี |
เตรียมข้อมูล
เตรียมอินพุตเป็นไฟล์รูปภาพหรืออาร์เรย์ NumPy จากนั้นแปลงเป็นออบเจ็กต์ mediapipe.Image หากอินพุตเป็นไฟล์วิดีโอหรือสตรีมแบบสดจากเว็บแคม คุณสามารถใช้ไลบรารีภายนอก เช่น OpenCV เพื่อโหลดเฟรมอินพุตเป็นอาร์เรย์ numpy
รูปภาพ
import mediapipe as mp # Load the input image from an image file. mp_image = mp.Image.create_from_file('/path/to/image') # Load the input image from a numpy array. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_image)
วิดีโอ
import mediapipe as mp # Use OpenCV’s VideoCapture to load the input video. # Load the frame rate of the video using OpenCV’s CV_CAP_PROP_FPS # You’ll need it to calculate the timestamp for each frame. # Loop through each frame in the video using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
ไลฟ์สด
import mediapipe as mp # Use OpenCV’s VideoCapture to start capturing from the webcam. # Create a loop to read the latest frame from the camera using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
เรียกใช้งาน
โปรแกรมจดจําท่าทางใช้ฟังก์ชัน recognize, recognize_for_video และ recognize_async เพื่อทริกเกอร์การอนุมาน สําหรับการจดจําท่าทางสัมผัส ขั้นตอนนี้เกี่ยวข้องกับการประมวลผลข้อมูลอินพุตเบื้องต้น การตรวจจับมือในรูปภาพ การตรวจหาจุดสังเกตของมือ และการจดจําท่าทางสัมผัสของมือจากจุดสังเกต
โค้ดต่อไปนี้แสดงวิธีดำเนินการประมวลผลด้วยโมเดลงาน
รูปภาพ
# Perform gesture recognition on the provided single image. # The gesture recognizer must be created with the image mode. gesture_recognition_result = recognizer.recognize(mp_image)
วิดีโอ
# Perform gesture recognition on the provided single image. # The gesture recognizer must be created with the video mode. gesture_recognition_result = recognizer.recognize_for_video(mp_image, frame_timestamp_ms)
ไลฟ์สด
# Send live image data to perform gesture recognition. # The results are accessible via the `result_callback` provided in # the `GestureRecognizerOptions` object. # The gesture recognizer must be created with the live stream mode. recognizer.recognize_async(mp_image, frame_timestamp_ms)
โปรดทราบดังต่อไปนี้
- เมื่อทำงานในโหมดวิดีโอหรือโหมดสตรีมแบบสด คุณต้องระบุการประทับเวลาของเฟรมอินพุตให้กับงานตัวจดจำท่าทางด้วย
- เมื่อทำงานในโมเดลรูปภาพหรือวิดีโอ งานโปรแกรมจดจำท่าทางสัมผัสจะบล็อกเธรดปัจจุบันจนกว่าจะประมวลผลรูปภาพหรือเฟรมอินพุตเสร็จ
- เมื่อทำงานในโหมดสตรีมแบบสด งานตัวจดจำท่าทางสัมผัสจะไม่บล็อกเธรดปัจจุบัน แต่จะแสดงผลทันที โดยจะเรียกใช้โปรแกรมรับฟังผลลัพธ์พร้อมผลการตรวจหาทุกครั้งที่ประมวลผลเฟรมอินพุตเสร็จแล้ว หากมีการเรียกใช้ฟังก์ชันการจดจำเมื่องานตัวจดจำท่าทางสัมผัสกำลังประมวลผลเฟรมอื่นอยู่ งานจะละเว้นเฟรมอินพุตใหม่
ดูตัวอย่างที่สมบูรณ์ของการใช้โปรแกรมจดจำท่าทางสัมผัสกับรูปภาพได้ที่ตัวอย่างโค้ด
จัดการและแสดงผลลัพธ์
ตัวจดจำท่าทางสัมผัสจะสร้างออบเจ็กต์ผลลัพธ์การตรวจจับท่าทางสัมผัสสําหรับการเรียกใช้การตรวจจับแต่ละครั้ง ออบเจ็กต์ผลลัพธ์ประกอบด้วยจุดสังเกตของมือในพิกัดรูปภาพ, จุดสังเกตของมือในพิกัดโลก, ลักษณะการจับถือ(มือซ้าย/ขวา) และหมวดหมู่ท่าทางมือของมือที่ตรวจพบ
ต่อไปนี้เป็นตัวอย่างข้อมูลเอาต์พุตจากงานนี้
GestureRecognizerResult ที่ได้จะมีคอมโพเนนต์ 4 รายการ และแต่ละคอมโพเนนต์จะเป็นอาร์เรย์ โดยแต่ละองค์ประกอบจะมีผลลัพธ์ที่ตรวจพบจากมือที่ตรวจพบ 1 ข้าง
ความถนัดของมือ
ลักษณะการจับถือแสดงว่ามือที่ตรวจพบเป็นมือซ้ายหรือมือขวา
ท่าทางสัมผัส
หมวดหมู่ท่าทางสัมผัสที่รู้จักของมือที่ตรวจพบ
จุดสังเกต
มีจุดสังเกตบนมือ 21 จุด โดยแต่ละจุดประกอบด้วยพิกัด
x,yและzระบบจะปรับพิกัดxและyเป็น [0.0, 1.0] ตามความกว้างและความสูงของรูปภาพตามลำดับ พิกัดzแสดงถึงระดับความลึกของจุดสังเกต โดยที่ระดับความลึกที่ข้อมือคือจุดเริ่มต้น ยิ่งค่านี้เล็ก สถานที่สำคัญก็จะยิ่งอยู่ใกล้กับกล้อง ขนาดของzใช้มาตราส่วนเดียวกับxโดยประมาณสถานที่สำคัญของโลก
นอกจากนี้ สถานที่สำคัญ 21 แห่งบนมือจะแสดงเป็นพิกัดโลกด้วย จุดสังเกตแต่ละจุดประกอบด้วย
x,yและzซึ่งแสดงพิกัด 3 มิติในชีวิตจริงเป็นเมตร โดยจุดเริ่มต้นอยู่ที่จุดศูนย์กลางเชิงเรขาคณิตของมือ
GestureRecognizerResult:
Handedness:
Categories #0:
index : 0
score : 0.98396
categoryName : Left
Gestures:
Categories #0:
score : 0.76893
categoryName : Thumb_Up
Landmarks:
Landmark #0:
x : 0.638852
y : 0.671197
z : -3.41E-7
Landmark #1:
x : 0.634599
y : 0.536441
z : -0.06984
... (21 landmarks for a hand)
WorldLandmarks:
Landmark #0:
x : 0.067485
y : 0.031084
z : 0.055223
Landmark #1:
x : 0.063209
y : -0.00382
z : 0.020920
... (21 world landmarks for a hand)
รูปภาพต่อไปนี้แสดงการแสดงภาพผลลัพธ์ของงาน
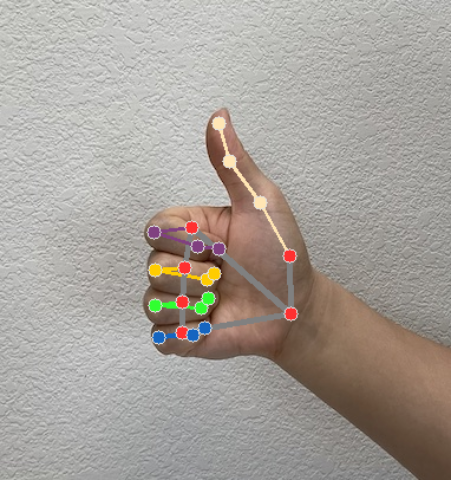
โค้ดตัวอย่างของตัวจดจำท่าทางแสดงวิธีแสดงผลการจดจำที่แสดงผลจากงาน ดูรายละเอียดได้ที่ตัวอย่างโค้ด